Index
- HDD vs SSD
- Il disco
- Come funziona un disco
- Prestazioni del disco
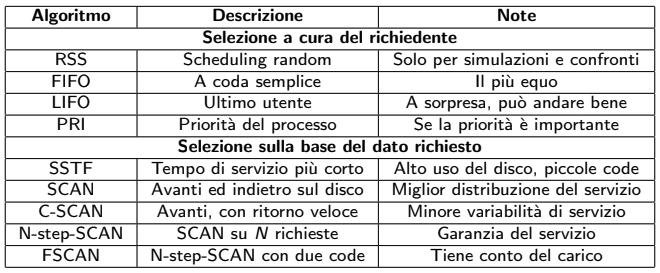
- Politiche di scheduling per il disco
- [[#Politiche di scheduling per il disco#FIFO|FIFO]]
- [[#Politiche di scheduling per il disco#Priorità|Priorità]]
- [[#Politiche di scheduling per il disco#LIFO|LIFO]]
- [[#Politiche di scheduling per il disco#Minimo tempo di servizio|Minimo tempo di servizio]]
- [[#Politiche di scheduling per il disco#SCAN|SCAN]]
- [[#Politiche di scheduling per il disco#C-SCAN|C-SCAN]]
- [[#Politiche di scheduling per il disco#FSCAN|FSCAN]]
- [[#Politiche di scheduling per il disco#N-step-SCAN|N-step-SCAN]]
- [[#Politiche di scheduling per il disco#Confronto prestazionale|Confronto prestazionale]]
- [[#Politiche di scheduling per il disco#Prospetto|Prospetto]]
- SSD: cenni
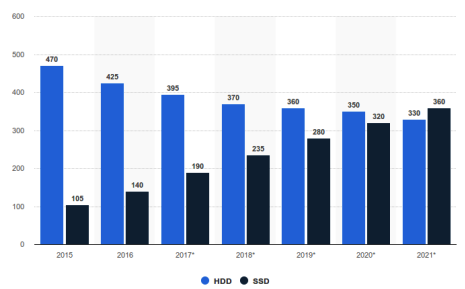
HDD vs SSD
Come abbiamo visto per gestire l’I/O il SO deve essere il più efficiente possibile. Uno degli ambiti su cui i progettisti di sistemi operativi si sono dati più da fare è quello dei dispositivi di archiviazione di massa
Le tecniche che tratteremo riguardano solo e unicamente gli HDD (non gli SSD). Gli SSD hanno diversi problemi, che però non tratteremo
Il disco
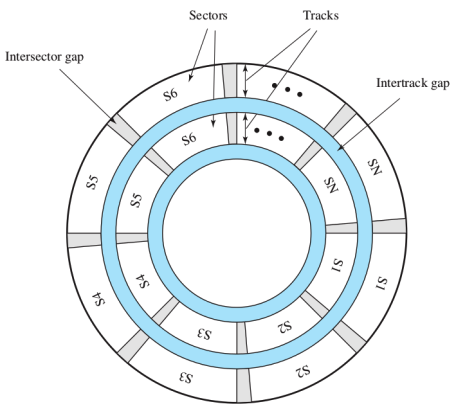
Una traccia è una corona circolare, avvicinandosi al centro diventa sempre più piccola Un settore è una parte di cerchio delimitata da due raggi
Chiaramente i settori e le tracce non sono contigui infatti si ha l’intertrack gap che separa due tracce, mentre l’intersector gap separa due settori. Sono presenti in quanto altrimenti non sarebbe possibile leggere e scrivere i dati con grande accuratezza
Come funziona un disco
I dati si trovano sulle tracce (corone concentriche) su un certo numero di settori. Quindi per leggere/scrivere occorre sapere su quale traccia si trovano i dati, e sulla traccia, su quale settore.
Per selezionare una traccia bisogna:
- spostare la testina, se il disco ha testine mobili (seek)
- selezionare una testina, se il disco a testine fisse Per selezionare un settore su una traccia bisogna aspettare che il disco ruoti (a velocità costante) Se i dati sono tanti, potrebbero essere su più settori o addirittura su più tracce (tipicamente un settore misura 512 bytes)
Prestazioni del disco
La linea temporale di un disco può essere riassunta come segue

- Tempo di accesso (access time) → somma di:
- Tempo di posizionamento (seek time) → tempo necessario perché la testina si posizioni sulla traccia desiderata
- Ritardo di rotazione (rotational delay) → tempo necessario affinché l’inizio del settore raggiunga la testina
- Tempo di trasferimento (transfer time) → tempo necessario a trasferire i dati che scorrono sotto la testina
A parte:
- wait for device → attesa che il dispositivo sia assegnato alla richiesta
- wait for channel → attesa che il sottodispositivo sia assegnato alla richiesta (se ci sono più dischi che condividono un unico canale di comunicazione)
Politiche di scheduling per il disco
Come è successo per la RAM, nel caso in cui ci troviamo su un disco con testine mobili, sono state pensate numerose vie per poter rendere il più efficiente possibile le operazioni di lettura e scrittura
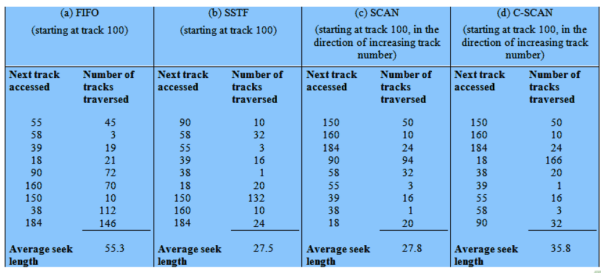
Tutte le politiche sotto elencante verranno confrontate su un esempio comune. All’inizio, la testina si trova sulla traccia numero su un totale di tracce Vengono richieste le seguenti tracce nel seguente ordine:
Consideriamo solo il seek time, che è il parametro più importante per le prestazioni. Verranno inoltre confrontati con lo scheduling peggiore, il random
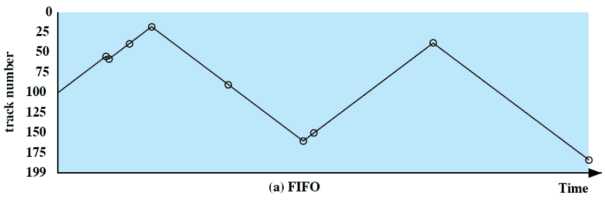
FIFO
Le richieste sono servite in modo sequenziale e risulta equo nei confronti dei processi. Se ci sono molti processi in esecuzione, le prestazioni sono simili allo scheduling
Priorità
In questo tipo di politica l’obiettivo non è ottimizzare il disco, ma raggiungere altri obiettivi. Vengono infatti soddisfatti per primi i processi con priorità più alta. In particolare è desiderabile fornire un buon tempo di risposta ai processi interattivi, ma i processi più lunghi potrebbero dover aspettare troppo tempo (infatti i processi batch sono corti) il che non risulta ottimale per i DBMS
LIFO
Questa politica risulta ottima per il DBMS (sequenza di istruzioni che non può essere interrotta) con transizioni. In questo caso dunque il dispositivo è dato all’utente più recente, se quindi un utente continua a fare richieste sul disco si potrebbe arrivare alla starvation. Il motivo per cui è usato è per il fatto che se un utente continua a fare richieste, probabilmente sta accedendo sequenzialmente ad un file, ed è quindi più efficiente far terminare la sua lettura che altro
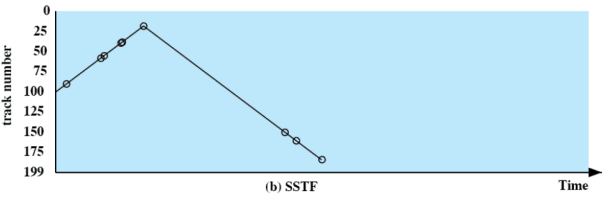
Minimo tempo di servizio
Da questa politica in poi, lo scopo sarà quello di minimizzare il seek time. Per quanto riguarda il minimo tempo di servizio Con questa politica si sceglie sempre il tempo di posizionamento minore (rispetto alle richieste attualmente pervenute)
Si potrebbe però arrivare a starvation nel caso in cui arrivino continuamente richieste più vicine
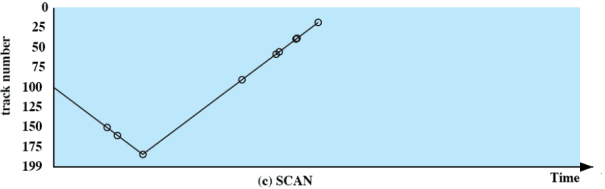
SCAN
Si fa in modo che le richieste siano servite in modo tale che il braccio si muova sempre in un verso, e poi torni indietro. In questo modo viene azzerata la starvation delle richieste ma risulta esse poco corretta poiché:
- favorisce le richieste ai bordi (attraversati due volte in poco tempo, in quanto vengono servite sia in discesa che in salita) → C-SCAN
- favorisce le richieste appena arrivate, nel senso che se ben piazzate rispetto alla testina, possono precedere richieste che attendono da molto → N-step-SCAN
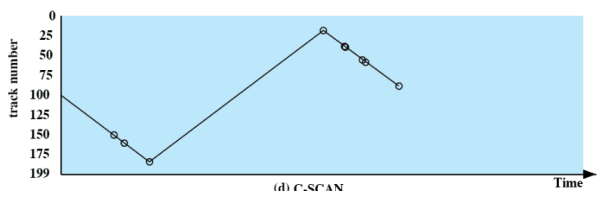
C-SCAN
Come SCAN ma non si scelgono le richieste allo scendere del numero della traccia. Quindi i bordi non sono più visitati due volte in poco tempo
FSCAN
Con questa politica vengono usate due code anziché una. Quando SCAN inizia, tutte le richieste sono nella coda , e l’altra coda è vuota. Mentre SCAN serve tutta , ogni nuova richiesta è aggiunta ad . Quando SCAN finisce di servire , si scambiano e . Ogni nuova richiesta deve aspettare che tutte le precedenti vengano servite, quindi le richieste vecchie non sono sfavorite rispetto alle nuove come in SCAN
N-step-SCAN
Questa politica è una generalizzazione di FSCAN a code. Si accodano le richieste nella coda i-esama finché non si riempie; poi si passa alla . Le richieste non sono mai aggiunte a quella attualmente servita. Se è alto, le prestazioni sono quelle di SCAN (ma con fairness), se , allora si usa il FIFO per evitare di essere unfair
Confronto prestazionale
Prospetto
SSD: cenni
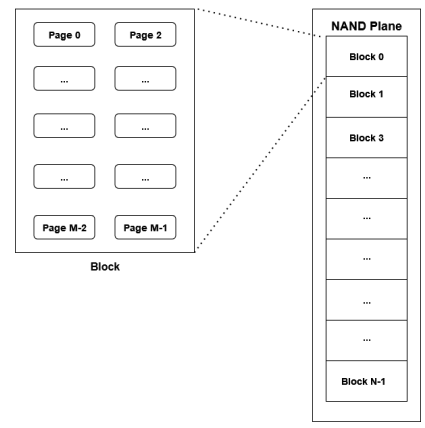
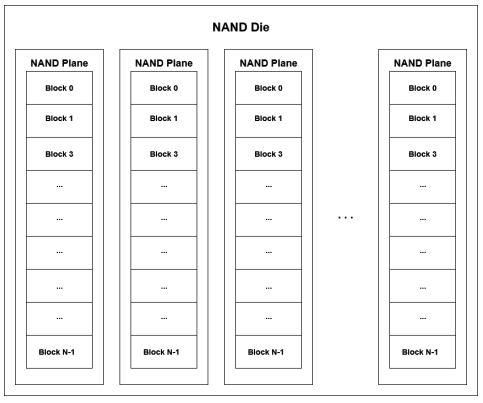
Gli SSD ad alto livello, sono costituiti da stack (flash chips) di die (matrici); il controller dell’SSD gestisce gli stack di die Ciascun die ha un certo numero di planes. Le planes sono divise in blocks (blocchi). Ciascun blocco è composto da un numero variabile di pages (pagine ). Infine le pagine sono composte da cells (celle). Le celle dunque sono le unità più piccole di un SSD e possono immagazzinare un solo bit (due per muti-level cells)
Le operazioni sugli SSD hanno granularità diversa in base al tipo di operazione:
- in lettura → l’unità di accesso minima solo le pagine
- in scrittura → l’unità di accesso minima è sempre la pagina, ma può essere scritta solo se vuota (non è possibile sovrascrittura) Sovrascrivere una pagine implica il dover azzerare l’intero blocco che la contiene
- Si fa una copia dell’intero blocco
- Si azzera il blocco
- Si scrive la nuova pagina
- Si copiano le pagine rimanenti della copia effettuata in precedenza
Gli SSD sono preferiti rispetto agli HDD perché estremamente veloci, infatti:
- nessun tempo richiesto per effettuare il seek (il che implica che non è meno problematico il sapere dove si trovino i dati)
- consentono accesso parallelo ai diversi flash chip
Sono state inoltre progettati algoritmi di accesso e file system progettati per massimizzare le performance di SSD (esistono addirittura dei file system dedicati, F2FS)