processi → permettono di elaborare dati e usare le risorse
Un file eseguibile, in esecuzione è chiamato processo. Per lanciare un processo bisogna eseguire il file corrispondente
Example
Esempi di processi sono quelli creati eseguendo i comandi delle lezioni precedenti (es. dd, ls, cat, …)
Però non tutti i comandi shell creano dei processi. Ad esempio echo e cd vengono esguito all’interno del processo di shell
Un file eseguibile più essere eseguito più volte dando vita ad un nuovo processo ogni volta e non è necessario attendere il termine della prima esecuzione per avviare la seconda (Linux è multi-processo)
Ridirezione dell’output
I simboli > e < possono essere utilizzati per redirigere l’output di un comando su di un file
Ad esempio:
ls>dirlist → output di ls redirezionato in dirlist
ls>dirlist 2>&1 → l’output di ls viene redirezionato in dirlist, includendo sia l’output normale (stdout, 1) che gli errori (stderr, 2). Redireziona stderr a stdout che è gia stato redirezionato a dirlist, allora anche gli errori finiranno lì
ls 2>&1 > dirlist → redirezione stderr a stdout (il terminale) così che gli errori mi vengano mostrati a terminale e poi redireziono stdout a dirlist (solo stdout va nel file, mentre gli errori rimangono sul terminale)
Rappresentazione dei processi
I processi sono identificati da:
Process Identifier (PID)
Process Control Block (PCB)
Sei aree di memoria
Process Identifier
E’ un identificatore univoco di un processo. In un dato istante, non ci possono essere 2 processi con lo stesso PID
Una volta che un processo e’ terminato, il suo PID viene liberato, e potrebbe essere prima o poi riusato per un altro processo
Process Control Block
Il PCB è unico per ogni processo e contiene:
PID: Process Identifier
PPID: Parent Process Identifier
Real UID: Real User Identifier
Real GID: Real Group ID
Effective UID: Effective User Identifier (UID assunto dal processo in esecuzione)
Effective GID: Effective Group ID (come sopra per GID)
Saved UID: Saved User Identifier (UID avuto prima dell’eseccuzione del SetUID)
Saved GID: Saved Group Identifier (come supra per GID)
Current Working Directory: directory di lavoro corrente
Umask: file mode creation mask
Nice: priorita statica del processo
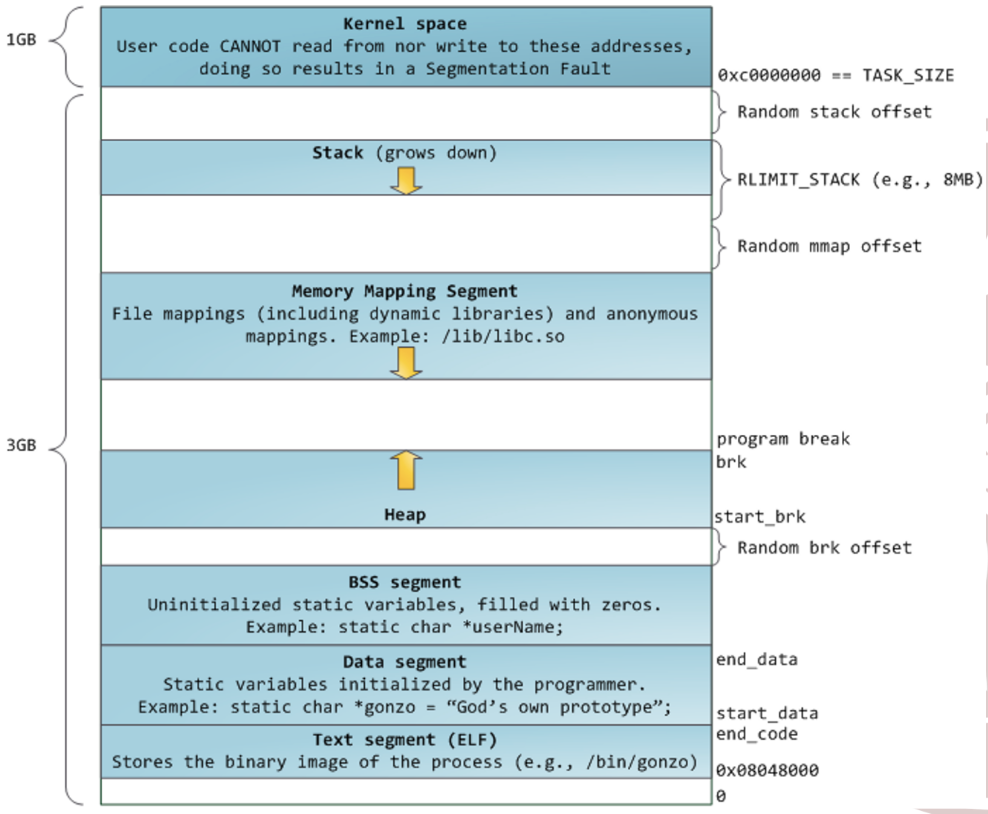
Aree di memoria
Le sei ree di memoria sono:
Text Segment → le istruzioni da eseguire
Data Segment → i dati statici (variabili globali, variabili locali static) inizializzati e alcune costanti di ambiente
BSS → dati statici non inizializzati (block started from symbol); la distinzione dal segmento dati si fa per motivi di realizzazione hardware
Heap → dati dinamici (allocati con malloc e simili)
Stack → chiamate a funzioni, con i corrispondenti dati dinamici (variabili locali non static)
Memory Mapping Segment → tutto ciò che riguarda librerie esterne dinamiche usate dal processo, nonché estensione dello heap in alcuni casi
Alcune aree di memoria però potrebbero essere condivise:
il text segment tra più istanze dello stesso processo
2 processi potrebbero avere lo stesso BSS o Data segment o MMS
Lo stack non è mai condiviso
Stato di un processo
Un processo può trovarsi in vari stati:
Running (R) → in esecuzione su un processore
Runnable (R) → pronto per essere eseguito (non è in attesa di alcun evento); in attesa che lo scheduler lo (ri)seleziona per l’esecuzione
(Interruptible) Sleep (S) → e in attesa di un qualche evento (ad esempio, lettura di blocchi dal disco), e non puo quindi essere scelto dallo scheduler
Zombie (Z) → il processo e’ terminato e le sue 6 aree di memoria non sono più in memoria; tuttavia, il suo PCB viene ancora mantenuto dal kernel perche il processo padre non ha ancora richiesto il suo “exit status” (ritorneremo su questo punto)
Stopped (T) → caso particolare di sleeping: avendo ricevuto un segnale STOP, e in attesa di un segnale CONT
Traced (t) → in esecuzione di debug, oppure in generale in attesa di un segnale (altro caso particolare di sleeping; vedremo più avanti)
Uninterruptible sleep (D) → come sleep, ma tipicamente sta facendo operazioni di IO su dischi lenti e non può essere interrotto ne ucciso
Modalità di esecuzione dei processi
Ci sono due modi per poter eseguire i processi:
forground
background
I forground sono praticamente tutti quelli visti fino ad ora, ovvero quelli in cui il comando può leggere l’input da tastiera e scrivere su schermo. Finché questo non termina, il prompt non viene restituito e non si possono sottomettere altri comandi alla shell
I processi in background non possono leggere l’input da tastiera ma può scrivere su schermo. In questo caso il prompt viene immediatamente restituito e mentre il job viene eseguito in background, si possono da subito dare altri comandi alla shell
Esecuzione in background
Per eseguire un comando in background viene usato l’operatore & (ampersand) che non è disponibile in tutte le shell. Questo viene posto alla fine di un comando
sleep 15s &
Lista di job
Per vedere la lista di job in esecuzione si usa il comando jobs [-l] [-p]
Se un job è composto da più task
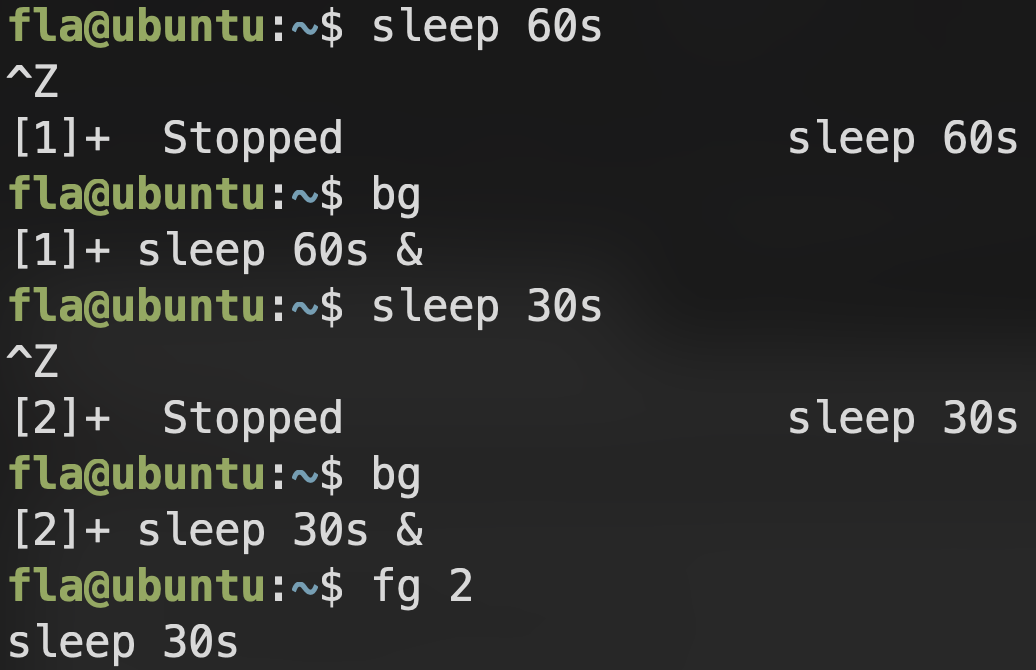
Comandi bg e fg
Il comando bg permette di portare un processo in background (lancio il processo; lo interrompo con CTRL+Z; lo risveglio con bg)
Invece fg [job_id] dove [job_id] è il numero del job, lo riporta in foreground, mentre gb [job_id] porta in background il processo [job_id]
Si possono identificare i job anche con:
[prefix] → dove prefix è la parte iniziale del job desiderato
+ oppure % → l’ultimo job mandato
- → il penultimo job mandato
Pipelining dei comandi
Per eseguire un job composto da più comandi si usa la pipe|
Example
comando1 | comando2 | … comando n
Lo standard output di un comando i diventa l’input del commando i+1
Se uso |& è lo standard error che viene redirezionato sullo standard input del comando successivo. Inoltre bisogna ricordare che il comando i+1 non deve necessariamente usare lo stdout/stderr del comando i
ps [opzioni] [pid...]
Il comando ps mostra le informazioni riguardo una selezione dei processi attivi (se si vuole un aggiornamento continua della selezione e le informazioni mostrare usare top)
Legge le informazioni dai file virtuali in /proc
ps senza argomenti mostra i processi dell’utente attuale lanciati dalla shell corrente. Per ognuno di essi mostra PID, TTY, TIME (tempo totale di esecuzione) e CMD
Vediamo ora le opzioni disponibili:
-e → tutti i processi di tutti gli utenti lanciati da tutte le shell o al boot (figli del processo 0)
-u {user} → tutti i processi degli utenti nella lista in input
-p {pid} → tutti i processi con i PID nella lista
-f → restituisce in output delle colonne addizionali quali UID, PPID, C (fattore di utilizzo della CPU, da 0 a 99) e STIME (tempo di avvio)
-l → altre colonne addizionali quali F (flag), PRI (priorità del processo, più basso → più alta priorità), NI (nice value, influenza la priorità), ADDR (indirizzo di memoria del processo), SZ (dimensione dell’immagine del processo in pagine), WCHAN (indirizza la funzione in cui il processo è in attesa, se dormiente)
-o {fields} → per scegliere i campi da visualizzare
-C {cmds} → mostra solo i processi il cui nome eseguibile è in {cmds}
Ci stanno anche i campi RUSER per il reale utente che ha avviato il processo e EUSER che corrisponde all’utente che ha eseguito il processo
Significato campi di output con flag -l
In ordine:
F → flags associati al processo: 1 il processo e stato “forkato”, ma ancora non eseguito; 4, ha usato privilegi da superutente; 5, entrambi i precedenti; 0, nessuno dei precedenti (-y -l elimina questo campo che e’ poco utile)
S → stato (modalita) del processo in una sola lettera
UID → utente che ha lanciato il processo (se SetUID presente pottrebbe non essere chi ha dato il comando)
PID → process id, identificatore del processo
PPID → parent pid, pid del processo che ha creato questo processo
C → parte intera della percentuale di uso della CPU
PRI → attuale priorita del processo (piu il numero e alto, minore e la priorita)
NI → valore di nice, da aggiungere alla priorita’ (vedere piu avanti)
ADDR → indirizzo in memoria del processo, ma e mostrato (senza valore) solo per compatibilita all’indietro (-y -l toglie questo campo e lo sostituisce con RSS - resident set size - dimensione del processo in memoria principale in KB - non tiene conto delle pagine su disco)
SZ → dimensione totale attuale del processo in numero di pagine (tutte le 6 aree di memoria del processo) sia in memoria che su disco (memoria virtuale)
WCHAN → se il processo e in attesa di un qualche segnale o comunque in sleep, qui c’e la funzione del kernel all’interno della quale si e fermato
TTY → rappresenta il nome del terminale da cui è stato avviato il processo
TIME → tempo di CPU usato finora
CMD → comando con argomenti
Significato campi di output con flag -f
L’unica differenza è data da STIME (o START) che indica l’ora in cui e stato invocato il comando, oppure la data, se e stato fatto partire da più di un giorno
top [-b] [-n num] [-p {pid}]
Permette di avere un ps ma costantemente aggiornato
-b → non accetta più comandi interattivi, ma continua a fare refresh ogni pochi secondi
-n num → fa solo num refresh
-p {pid} → come in ps
Una volta aperto in modo interattivo, basta premere ? per avere la lista dei comandi accettati
kill [-l [signal]] [-signal] [pid...]
Permette di inviare segnali ad un processo (non sono la terminazione). Un segnale è identificato da un numero oppure dal nome con SIG o senza SIG (es. kill -9 pid oppure kill -SIGKILL pid oppure kill -KILL pid)
-l [signal] → mostra la lista dei segnali; specificando signal converte il numero di segnale nel nome o viceversa
I segnali verranno presi in considerazione solo se il real user del processo è lo stesso che invia il segnale (oppure se lo invia un superuser).
Un processo che riceve un segnale fa o un’azione predefinita (man 7 signal) o un’azione personalizzata
Alcuni segnali
SIGSTOP, SIGSTP → sospensione processo
SIGCONT → per la continuazione di processi stoppati
SIGKILL, SIGINT → per la terminazione dei processi
Info
CTRL+Z invia un SIGSTOP
CTRL+C invia un SIGINT
bg invia SIGCONT al job indicato
con kill si può usare la notazione con % (usata in bg e fg) per indicare i job destinatari del messaggio
SIGUSR1 e SIGUSR2
I segnali SIGUSR1 e SIGUSR2sono impostati per essere usati dall’utente per le proprie necessità. Essi consentono una semplice forma di comunicazione tra processi
Example
In un programma P1 si puó definire un gestore del segnale (signal handler) per SIGUSR1(o 2). Se un programma P2 invia un SIGUSR1 (o 2) a P1, P1 eseguirà il codice del gestore del segnale
nice [-n num] [command]
nice senza opzioni dice quant’è il niceness di partenza. Il niceness può essere pensato come un’addizione sulla priorità: se positivo, ne aumenta il valore (quindi la priorità decresce), altrimenti ne diminuisce il valore (la priorità cresce). Questo può andare a −19 a +20 con valore di default 0
command → lancia command con niceness num (0 se non dato)
renice priority {pid}
Interviene su processi già in esecuzione (infatti richiede dei PID) e serve per cambiare la priorità dei processi
strace [-p pid] [command] [-o file]
Lancia command mostrando tutte le sue system calls, oppure visualizza le system call del processo pid. Tramite -o file ridimensiona l’output su un file
Ci sarà utile per il debug dei programmi che usano le system call
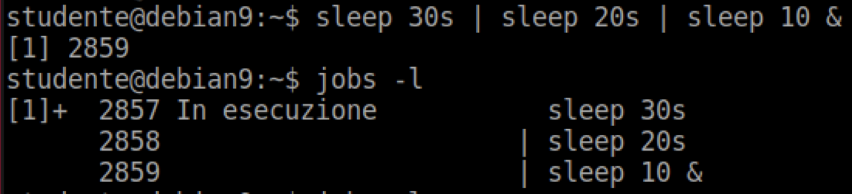 Se un job è composto da più task
Se un job è composto da più task